SPI là một chuẩn giao tiếp do Motorola đưa ra, được dùng chủ yếu để giao tiếp tầm gần giữa các module trong cùng một hệ thống. SPI có thể truyền dữ liệu hai chiều tại cùng một thời điểm. Đây là một giao thức master/slave, có nghĩa là sẽ có duy nhất một trạm đóng vai trò là master và một hoặc nhiều trạm đóng vai trò là slave. Chỉ master được phép điều khiển việc truyền nhận.
SPI có 4 dây là clock, dây gửi dữ liệu, dây nhận dữ liệu, và dây chọn slave (trong trường hợp có nhiều slave kết nối vào master). Nguyên lý hoạt động là cứ 1 xung clock thì chip sẽ đọc giá trị tại dây data.
SCK - dây clock
MISO - master in, slave out
MOSI - master out, slave in
SS - slave select
SPI được sử dụng khá phổ biến, chẳng hạn trong chip NRF24L01 hoặc trong các loại màn hình LCD, OLED, TFT.
Bài viết này sẽ hướng dẫn bạn cách viết code 1 chương trình SPI đơn giản giao tiếp giữa hai board SM32F103C8T6. Master trên cổng spi1, slave trên cổng spi2, master sẽ định kỳ cứ 2s gửi 1 byte dữ liệu xuống slave, delay 100ms sau đó đọc dữ liệu từ slave gửi lên. Slave mỗi khi nhận được dữ liệu sẽ chớp đèn LED.
BOARD MASTER
1. Chọn Configuration > SYS > Debug là Serial Wire. SPI1 là full duplex master. PC13 (LED) là GPIO output

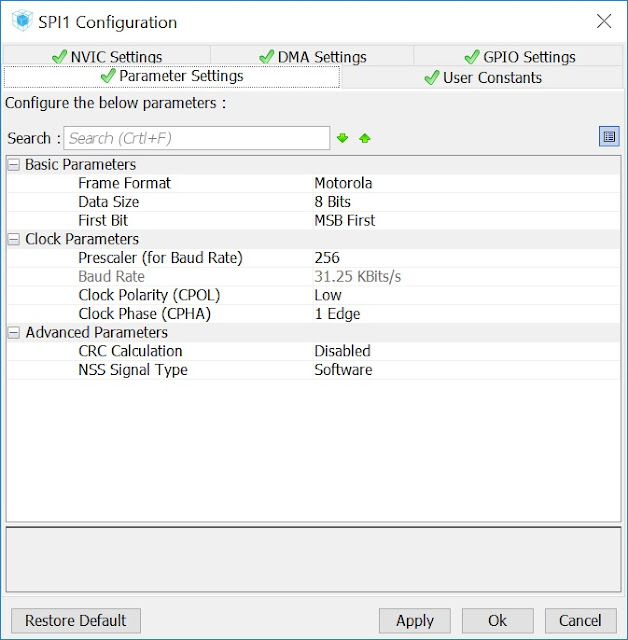
2. Trong SPI1, param settings, chọn prescaler là 256 cho tốc độ khoảng 32.25 KBits/s
3. Bật ngắt SPI1

4. Viết code master như sau, sử dụng các hàm HAL_SPI_RxCpltCallback (hàm trả về khi hoàn thành việc nhận dữ liệu), HAL_SPI_Transmit (gửi dữ liệu ở chế độ blocking, tức là gửi dữ liệu xong thì hàm mới trả về và chương trình chính mới tiếp tục thực hiện), HAL_SPI_Receive_IT (hàm nhận dữ liệu ở chế độ non-blocking, tức là hàm sẽ trả về cho chương trình chính ngay lập tức và khi nhận được dữ liệu thì một hàm trả về sẽ được gọi), HAL_SPI_GetState

BOARD SLAVE
1. Chọn Configuration > SYS > Debug là Serial Wire. SPI2 là full duplex slave. PC13 (LED) là GPIO output

2. Trong SPI2, param settings, chọn prescaler là 256 cho tốc độ khoảng 32.25 KBits/s

3. Bật ngắt SPI2

4. Viết code slave như sau, sử dụng các hàm HAL_SPI_RxCpltCallback, HAL_SPI_Receive_IT, HAL_SPI_Transmit_IT
Trong hàm main, gọi HAL_SPI_Receive_IT(&hspi2, &rx_data, 1); để bắt đầu nhận dữ liệu

Sử dụng hai board STM32F103C8T6, một board nạp code master, một board nạp code slave.
Kết nối:
Master SCK (PA5) <-----> Slave SCK (PB13)
Master MISO (PA6) <-----> Slave MOSI (PB15)
Master MOSI (PA7) <-----> Slave MISO (PB14)
Master GND <-----> Slave GND
Mã nguồn có thể download tại đây https://drive.google.com/open?id=1vylT7OS9A8W3JXDVCDhy1qFe-Tm0Y5SU.
SPI có 4 dây là clock, dây gửi dữ liệu, dây nhận dữ liệu, và dây chọn slave (trong trường hợp có nhiều slave kết nối vào master). Nguyên lý hoạt động là cứ 1 xung clock thì chip sẽ đọc giá trị tại dây data.
SCK - dây clock
MISO - master in, slave out
MOSI - master out, slave in
SS - slave select
SPI được sử dụng khá phổ biến, chẳng hạn trong chip NRF24L01 hoặc trong các loại màn hình LCD, OLED, TFT.
Bài viết này sẽ hướng dẫn bạn cách viết code 1 chương trình SPI đơn giản giao tiếp giữa hai board SM32F103C8T6. Master trên cổng spi1, slave trên cổng spi2, master sẽ định kỳ cứ 2s gửi 1 byte dữ liệu xuống slave, delay 100ms sau đó đọc dữ liệu từ slave gửi lên. Slave mỗi khi nhận được dữ liệu sẽ chớp đèn LED.
BOARD MASTER
1. Chọn Configuration > SYS > Debug là Serial Wire. SPI1 là full duplex master. PC13 (LED) là GPIO output

2. Trong SPI1, param settings, chọn prescaler là 256 cho tốc độ khoảng 32.25 KBits/s

3. Bật ngắt SPI1

4. Viết code master như sau, sử dụng các hàm HAL_SPI_RxCpltCallback (hàm trả về khi hoàn thành việc nhận dữ liệu), HAL_SPI_Transmit (gửi dữ liệu ở chế độ blocking, tức là gửi dữ liệu xong thì hàm mới trả về và chương trình chính mới tiếp tục thực hiện), HAL_SPI_Receive_IT (hàm nhận dữ liệu ở chế độ non-blocking, tức là hàm sẽ trả về cho chương trình chính ngay lập tức và khi nhận được dữ liệu thì một hàm trả về sẽ được gọi), HAL_SPI_GetState
BOARD SLAVE
1. Chọn Configuration > SYS > Debug là Serial Wire. SPI2 là full duplex slave. PC13 (LED) là GPIO output

2. Trong SPI2, param settings, chọn prescaler là 256 cho tốc độ khoảng 32.25 KBits/s

3. Bật ngắt SPI2

4. Viết code slave như sau, sử dụng các hàm HAL_SPI_RxCpltCallback, HAL_SPI_Receive_IT, HAL_SPI_Transmit_IT
Trong hàm main, gọi HAL_SPI_Receive_IT(&hspi2, &rx_data, 1); để bắt đầu nhận dữ liệu
Sử dụng hai board STM32F103C8T6, một board nạp code master, một board nạp code slave.
Kết nối:
Master SCK (PA5) <-----> Slave SCK (PB13)
Master MISO (PA6) <-----> Slave MOSI (PB15)
Master MOSI (PA7) <-----> Slave MISO (PB14)
Master GND <-----> Slave GND
Mã nguồn có thể download tại đây https://drive.google.com/open?id=1vylT7OS9A8W3JXDVCDhy1qFe-Tm0Y5SU.
Comments
Post a Comment